We develop, distribute, and maintain peer-reviewed software with three purposes:
Our Software Research Mission
A quintessential target area for innovation today is to bridge the gap between mathematical semantics, physical notions, and computer programming languages. Owing to the physical complexity inherent to reservoir engineering problems, simulator developers have long recognized the pains and needs in this area. The goal of this research direction is to rethink and reengineer the way that we develop, deliver, and maintain simulation software in order to realize a future where:
A
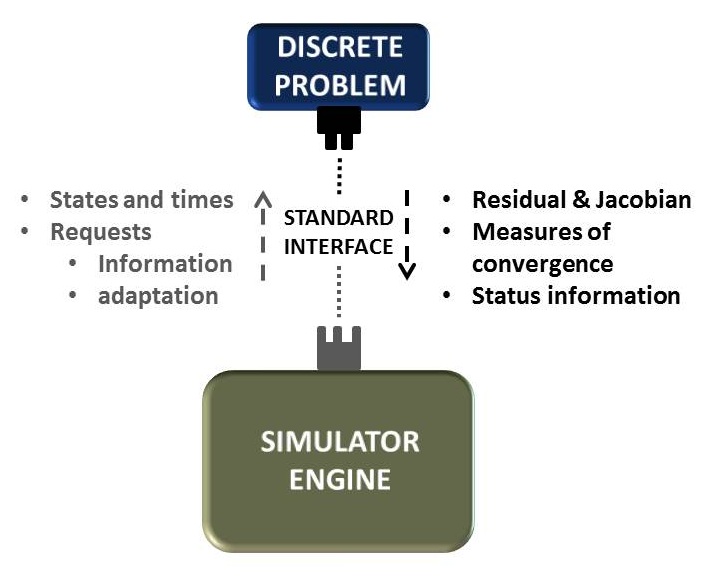
Discrete Problem
is a software abstraction that implements the fully discretized
equations that are solved by a simulator in order to obtain discrete
approximations to the state variables in space and time.
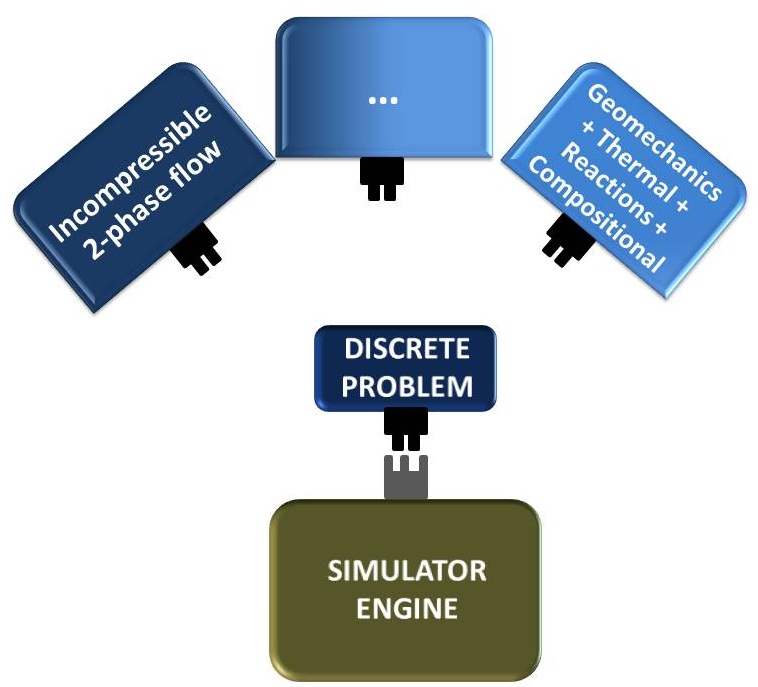
As illustrated in the figures above, a Discrete Problem
must offer a two-way interface that is well-engineered to admit a wide
and growing plethora of numerical solution methods while simultaneously
preventing the exposure of its internal particulars. A standardized
interface will ensure effortless interchangeability of Discrete Problem
implementations, thereby supporting both the Tailor- and
General-Purpose paradigms.At a minimum, a conforming Discrete Problem interface
should be able to produce a discrete residual system and Jacobian
matrix that are evaluated at given input states. Generic designs allow
the parameterization of the Physics to any conforming numerical
datastructures. The interface must
also accommodate requests to adapt the internal specifics of the
discrete numerical approximation. Our research in this area focuses on developing a universal interface, and more importantly, on providing a software toolkit that cuts the development cost of any Discrete Problem
to a minimum. This is to be accomplished by the automation of the
activities entailed in developing a Discrete Problem.
The Discrete Problem Programming Toolkit (DPPT) is a multilayered library of highly configurable generic datastructures and algorithms. Modules within different layers can be used to develop a generic Discrete Problem using
different semantics and levels of abstraction. Below
is a depiction of the DPPT modules that are arranged in three layers.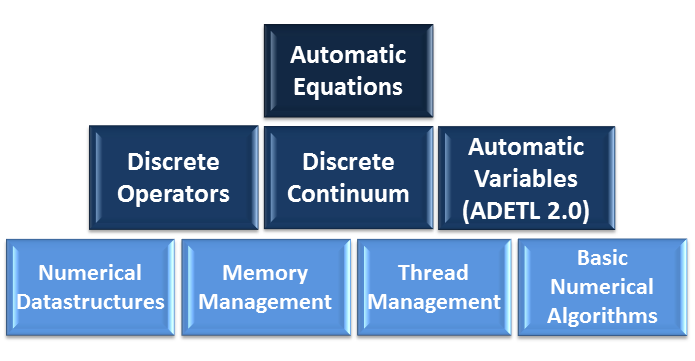 1. Base Layer The DPPT base layer offers several modules that implement efficient numerical datastructures and algorithms. The semantics are closely tied to standard library concepts when efficiency is not sacrificed. For example, while standard library memory allocators cannot maintain state, our alternatives bypass these concept requirements in order to admit multithreaded pools. A beta point of departure for these modules is available in the faSTL library.
The middle layer offers modules that generically implement all aspects of discretizing and linearizing vector calculus operators. The semantics are mathematical. Configuration choices for all orthogonal aspects can be made by changing single tags within user code. For example, the following listing calculates the discrete nonlinear Laplacian and its analytical Jacobian matrix using single point upwinding and the MPFA O-method on a Cartesian topology that is ordered according to a Hilbert space-filling curve: Variableset<
memoryLayout, ADvector > U;DiscreteContinuum mesh(
UniformCartesianBuilder< PeanoHilbert > build( "datafile.txt" ) );Laplacian< Omethod > ( mesh,
U[TRANS].begin(), U[POTENTIAL].begin(), F.begin() );
3. Top Layer The top layer module will offer abstractions for general partial differential equations such as the nonlinear transient advection-reaction-diffusion equations, Helmholtz and Poisson forms, and the time-dependent second-order wave equation. We are designing and developing datastructure-neutral implementations of timestepping, nonlinear, and linear solution algorithms. The prime purpose for GenSOL is to provide a convenient platform with which to reproduce, analyze, compare, and even use all of our contributions in the solvers area. Efforts such as our proposed DPPT promise to cut down on the costs of computer programming for the development of the physics portion of a simulator. Such efforts are exclusively tied to the underlying programming language. Moreover, they are typically only used by expert developers, barring the domain expert from direct participation. Problem Solving Environments such as "multiphysics packages" (e.g. COMSOL and the MRST) provide the means to develop physical models and simulation tools without the need for advanced programming language semantics. The efficiency and scalability of these tools however, remain far from ideal relative to compiled software. The purpose of the ASGS direction is simply to bridge this gap. We propose to develop a system that can translate domain-specific and high-level mathematical markup into C++ using the DPPT constructs. The schematic below illustrates this process. 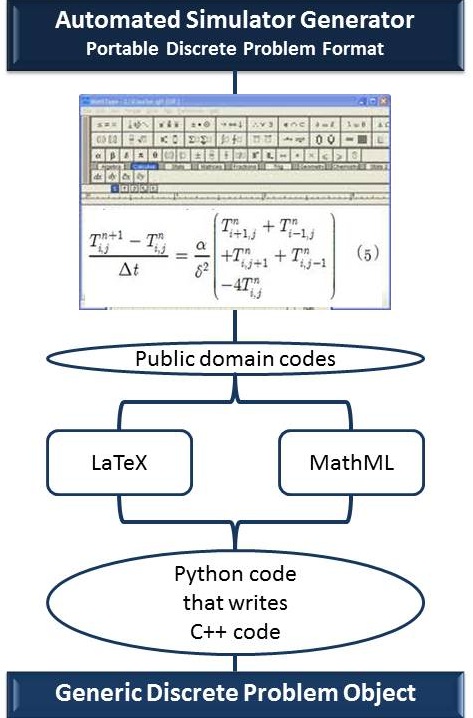 The ASGS will ultimately enable cost-free customization of the physics within simulators. Domain experts can use a graphical equation editor to write, share, and disseminate "new models", while vendors will be able to provide software that implements these models without incurring additional costs. The responsibility of devising well-posed physical models will be in the hands of the domain expert. 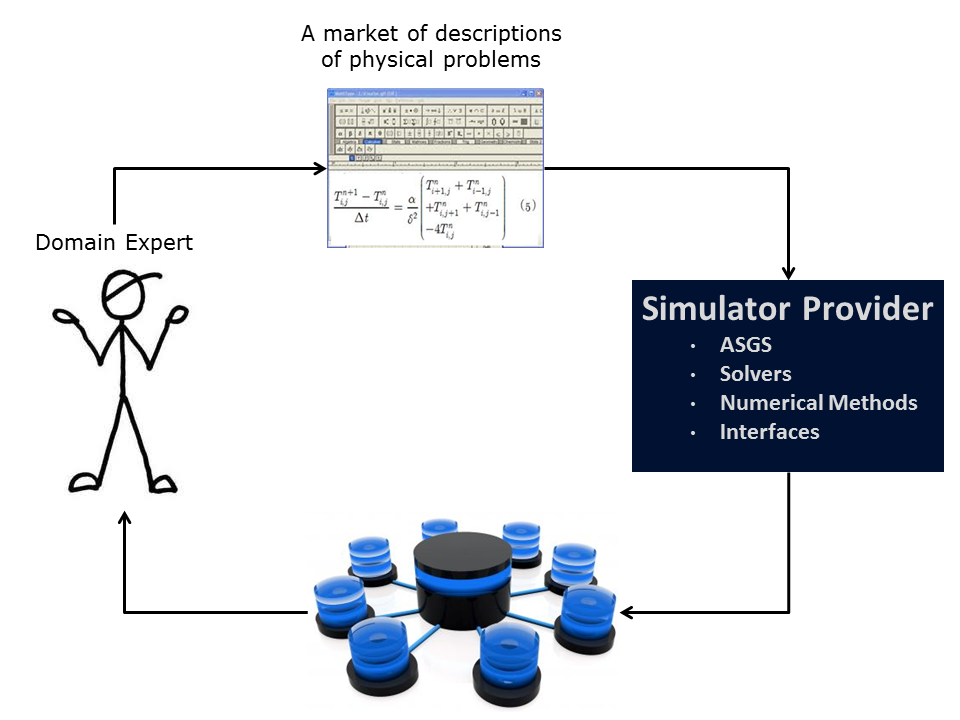
|